在PVCBOT项目中我们经常采用的是一款带微型减速齿轮箱的电机,但是由于该型号减速电机的一些不足以及PVCBOT项目的一些特殊需要,我们还需要对该电机进行一定的改造完善:
1)该微型减速电机所带的齿轮减速箱,使得转速已经降得比较低,但是输出的扭矩(动力)也不是太高,动力还是有点不足。
2)该微型减速电机是单侧输出转动轴的,无法满足要左右两侧同轴驱动的机器人项目的要求。
基本原理
在PVCBOT项目中我们经常采用的是一款带微型减速齿轮箱的电机,但是由于该型号减速电机的一些不足以及PVCBOT项目的一些特殊需要,我们还需要对该电机进行一定的改造完善:
1)该微型减速电机所带的齿轮减速箱,使得转速已经降得比较低,但是输出的扭矩(动力)也不是太高,动力还是有点不足。
2)该微型减速电机是单侧输出转动轴的,无法满足要左右两侧同轴驱动的机器人项目的要求。
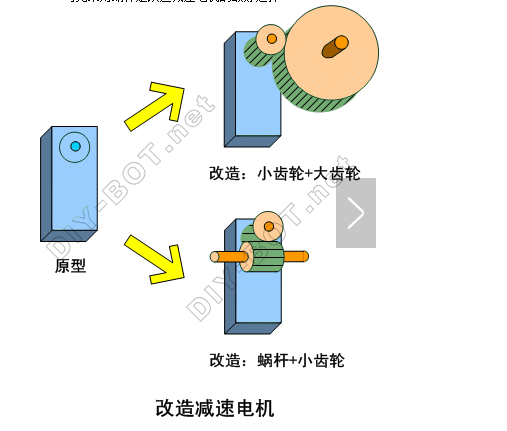
为此,我们可以为该微型减速电机再增加一级减速齿轮,即:
1)通过进一步降低转速来提高扭矩(动力);
2)这增加的一级齿轮我们采用一种称之为“蜗杆”的结构与齿轮配合组成新的减速机构,同时把单侧输出转动轴变为双侧输出转动轴。
这里可能有朋友会问,为什么这里不全部采用常规齿轮而是还要用蜗杆呢?
确实,通常情况下我们是可以全部采用常规齿轮来减速,但是在这里我们受到了所采用的减速电机的形状和体型的制约,不得已而借助了涡杆来减速。
1)假如采用常规齿轮,小的齿轮不好安装,齿轮轴会顶住电机;而大齿轮虽然便于安装,可以让齿轮轴远离减速电机,但是大齿轮却导致减速比太大,最终可能会把输出的转速降得过低导致机器人行动过慢;
2)假如采用蜗杆,可以配合小的齿轮,同时利用蜗杆机构能够让转轴的方向垂直改变的特性,既确保了减速比不至于过大,也不会因为顶住电机本身导致安装不方便。
可见采用蜗杆是改造减速电机的最好选择。
 所谓“蜗杆传动”,即指由蜗杆与蜗轮(齿轮)互相啮合组成的交错轴间的齿轮传动。蜗杆传动是在空间交错的两轴间传递运动和动力的一种传动,两轴线间的夹角可为任意值,常用的为90°。蜗杆传动由蜗杆和蜗轮组成,一般蜗杆为主动件。蜗杆传动的主要特点:
1、可以个改变两轴的夹角,可以充分的利用安装空间减小装置的尺寸,这也是本项目采用蜗杆的一个主要原因。
2、另外蜗杆传动还具有自锁特性,一般蜗杆为主动件,只能蜗杆带动齿轮,反过来齿轮不能带动蜗杆,用在一些防止被动件反过来带动主动件的情况,就比如 PVCBOT-12号 的吊绳机器人,如果是B版的太阳能版本,当机器人还在充电状态电机没有输出动力时,如果齿轮箱的减速比不够大导致反向扭矩不足时,有可能机器人静止吊在绳索上时反过来其手臂被自身的重量扭转,导致无法保持一个静止的姿势,而是出现电机一停手臂就软下来了情况。而如果用蜗杆传动则可以充分利用其自锁性确保电机停止时手臂还是保持原来的姿势。
根据改造后减速箱所采用的轴的直径的不同,以及减速电机的安装方向,则我们可以有多种不同的减速电机改造方式。
所谓“蜗杆传动”,即指由蜗杆与蜗轮(齿轮)互相啮合组成的交错轴间的齿轮传动。蜗杆传动是在空间交错的两轴间传递运动和动力的一种传动,两轴线间的夹角可为任意值,常用的为90°。蜗杆传动由蜗杆和蜗轮组成,一般蜗杆为主动件。蜗杆传动的主要特点:
1、可以个改变两轴的夹角,可以充分的利用安装空间减小装置的尺寸,这也是本项目采用蜗杆的一个主要原因。
2、另外蜗杆传动还具有自锁特性,一般蜗杆为主动件,只能蜗杆带动齿轮,反过来齿轮不能带动蜗杆,用在一些防止被动件反过来带动主动件的情况,就比如 PVCBOT-12号 的吊绳机器人,如果是B版的太阳能版本,当机器人还在充电状态电机没有输出动力时,如果齿轮箱的减速比不够大导致反向扭矩不足时,有可能机器人静止吊在绳索上时反过来其手臂被自身的重量扭转,导致无法保持一个静止的姿势,而是出现电机一停手臂就软下来了情况。而如果用蜗杆传动则可以充分利用其自锁性确保电机停止时手臂还是保持原来的姿势。
根据改造后减速箱所采用的轴的直径的不同,以及减速电机的安装方向,则我们可以有多种不同的减速电机改造方式。
1、轴的直径:由于我们采用的蜗杆以及齿轮的轴直径是常见的2mm的缘故,这里我们把直径为2mm的轴定义为标准轴,而其他直径的轴认为是非标准轴。假如是标准2mm的轴,则一般可以把蜗杆和齿轮直接很紧固的套在轴上,而其他小于2mm的轴则需要额外用胶水与轴固定。
也就是说,采用标准轴则固定蜗杆和齿轮比较简单,但是因为比较紧则需要用较大的力气和一定的技巧才能装好;而采用非标准轴,由于轴的直径小于蜗杆和齿轮,要把轴与蜗杆及齿轮紧固在一起需要借助502之类的胶水,也因为如此往往容易不小心让502胶水把电机给粘死导致电机报废。
PVCBOT早期的套件采用的是非标准的轴(直径1.8mm),后来由于不少网友反映对于用502胶水来紧固轴与蜗杆及齿轮的操作不好把握,而且由于胶水质量的问题容易固定不稳导致脱落,所以PVCBOT新的套件都采用了标准的轴(直径2mm) 。
2、电机的方向:假如减速电机的安装方向与最终输出的轴是互相水平的,则我们称之为横向安装电机,假如减速电机的安装方向与最终输出的轴是互相垂直的,则我们称之为纵向安装电机。
假如是横向安装减速电机,则对电机的固定位置的精度不用太高,因为固定减速电机之后还可以通过围绕固定的螺丝来摆动电机的角度以调整蜗杆与齿轮的咬合程度,也就是说横向安装减速电机过程上要简单一些。但是由于减速电机是有一定长度的,则会导致最终的减速箱不是完全的左右对称,则会对整体机器人的结构有一点影响。
假如是纵向安装减速电机,则对于电机的固定位置的精度要求比较高,因为一旦用螺丝固定了减速电机的位置之后就无法调整蜗杆与齿轮的咬合程度,即纵向安装减速电机要求要高一些。不过其最终的减速箱是左右平衡对称的,比较有利于机器人整体结构的设计。
总之,横向安装电机的工艺要求低,但结构不是很理想;而纵向安装电机的工艺要求高,但结构却比较理想。具体选择时可以根据项目要求以及工艺水平而定。
东莞市晨曦齿轮有限公司成立于2009年,位于东莞市清溪镇,是由香港联合公司和原惠阳晨曦公司共同投资而成的中外合资企业,专业制造小模数齿轮、精密小模数齿轮、精密车件等产品,我们生产的产品精度高,体积小,力距大,噪音低,传动平稳,性能佳,寿命长;输出轴直径,长短,材质,形状,可根据客户的要求特别定制;


